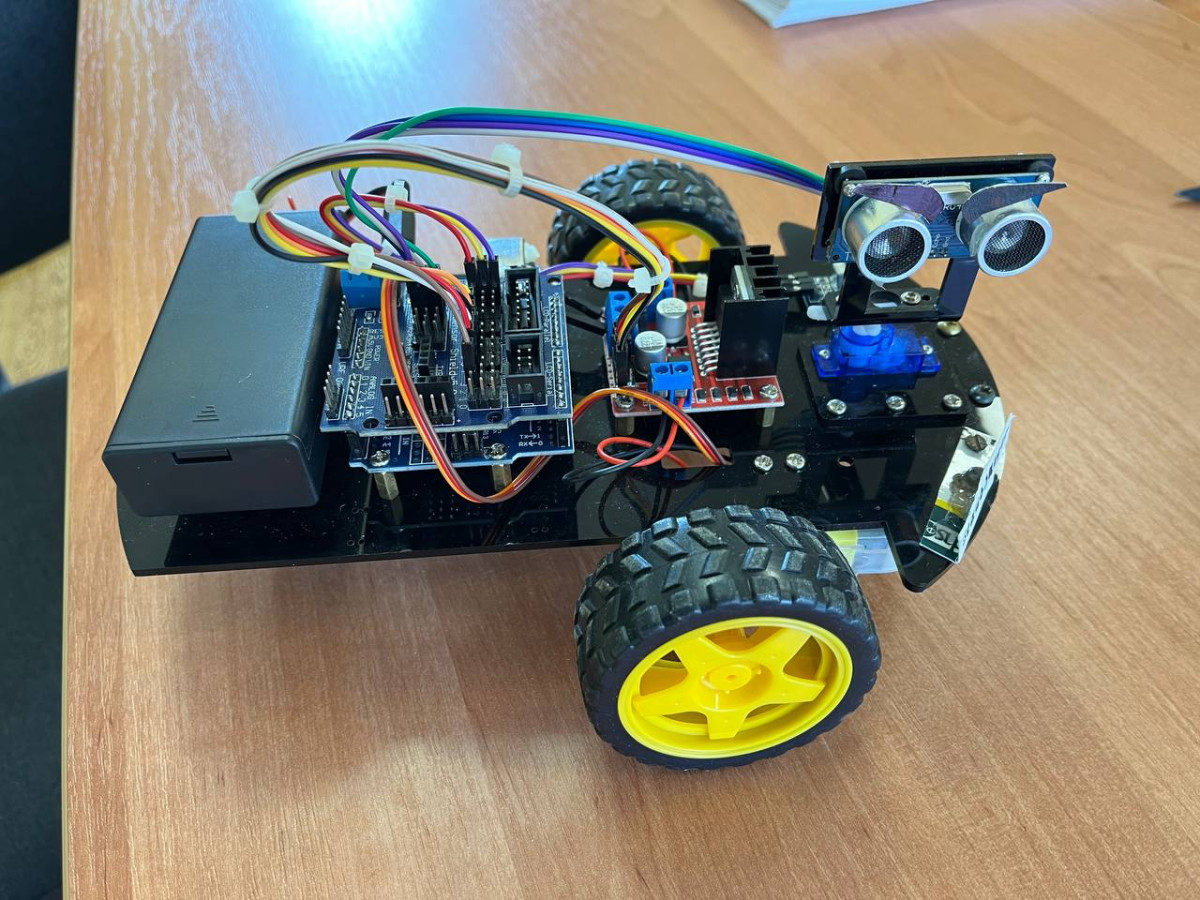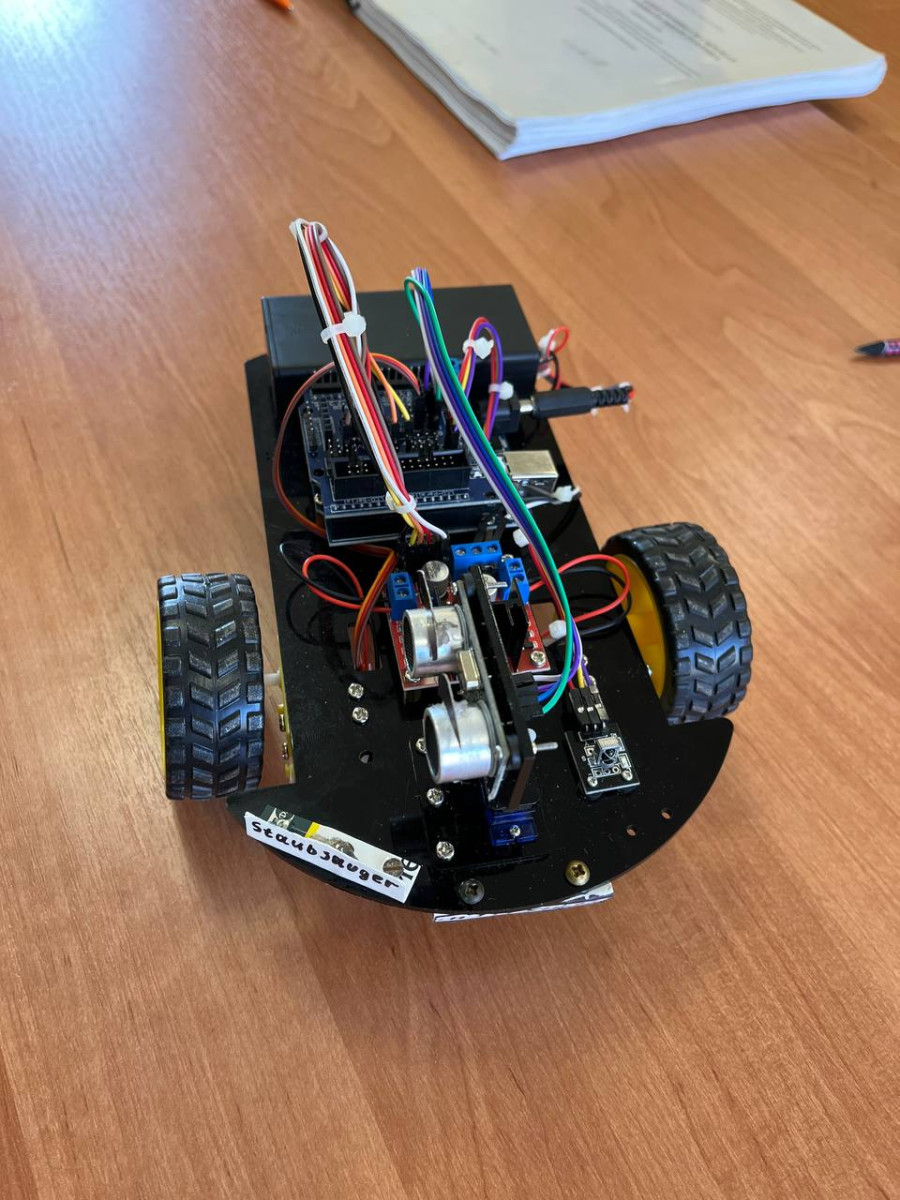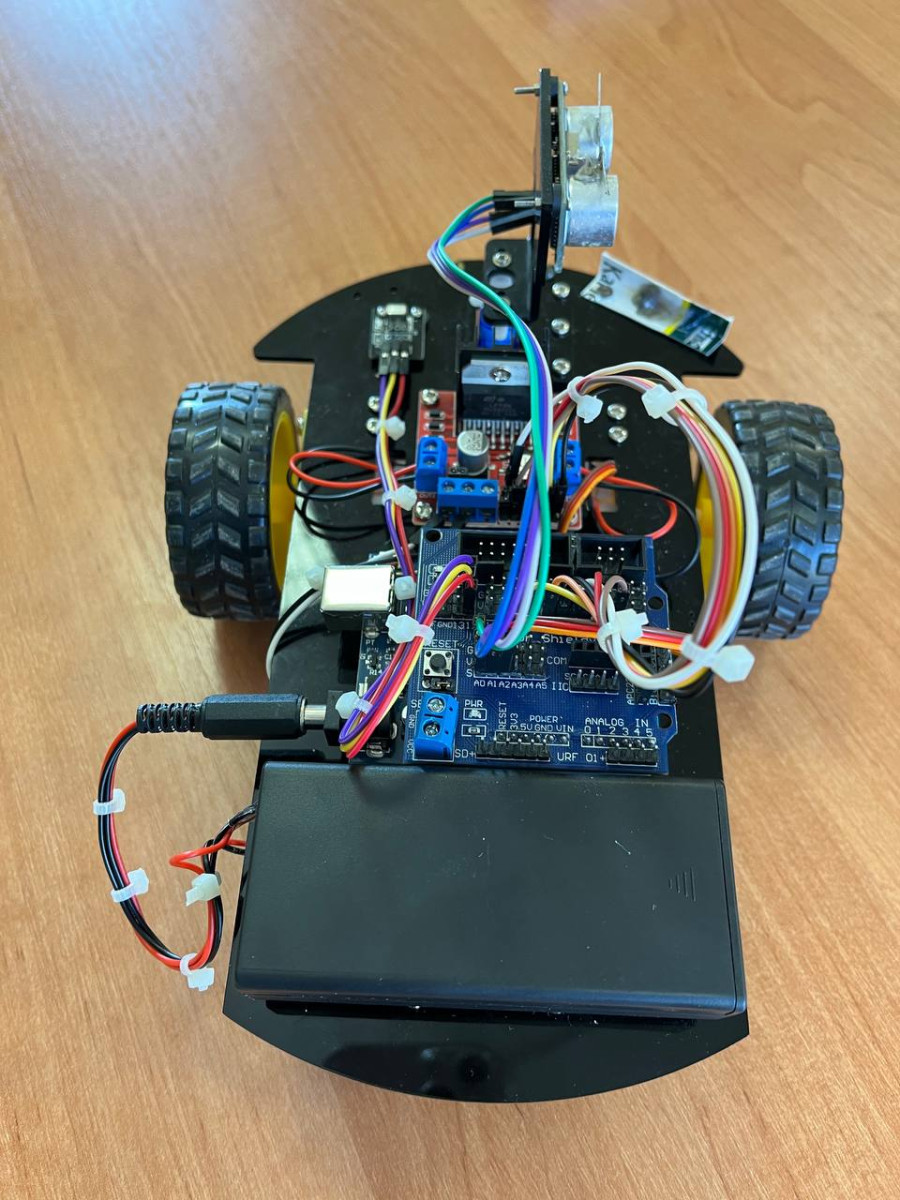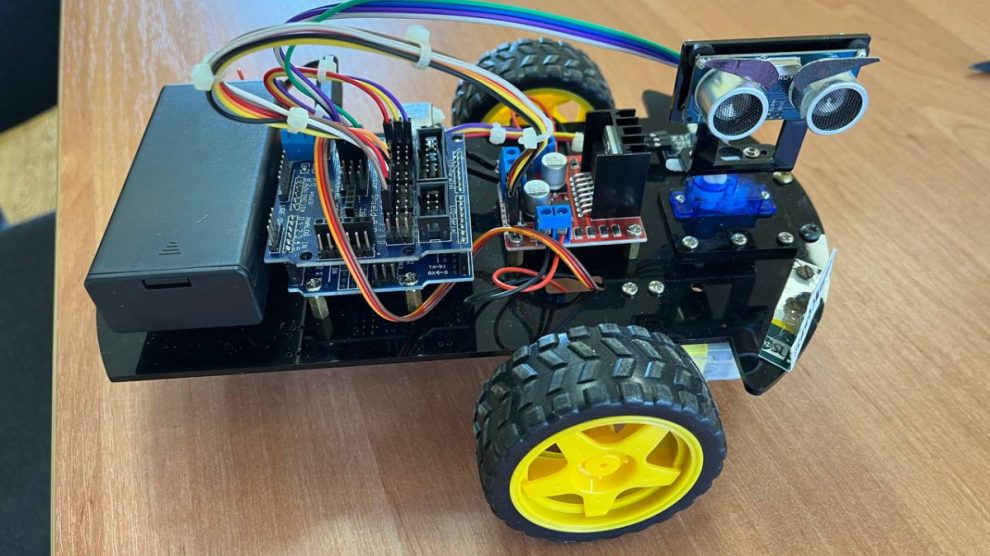
С использованием общедоступных шасси робота на колесах участники курсантско-студенческого конструкторского бюро «Бюро ЭлектроТехнического Творчества и Инноваций» КСКБ «БЭТТИ» разрабатывают алгоритмы определения препятствий и поведения в пространстве робототехнического устройства.
В рамках сотрудничества КСКБ «БЭТТИ» с лабораторией «Электротехники и силовой электроники» кафедры ЭСиАП разработанные курсантами алгоритмы и проведенные испытания и исследования способствуют исследованию и разработке подводных и надводных роботов, которые смогут найти применение в морской отрасли.