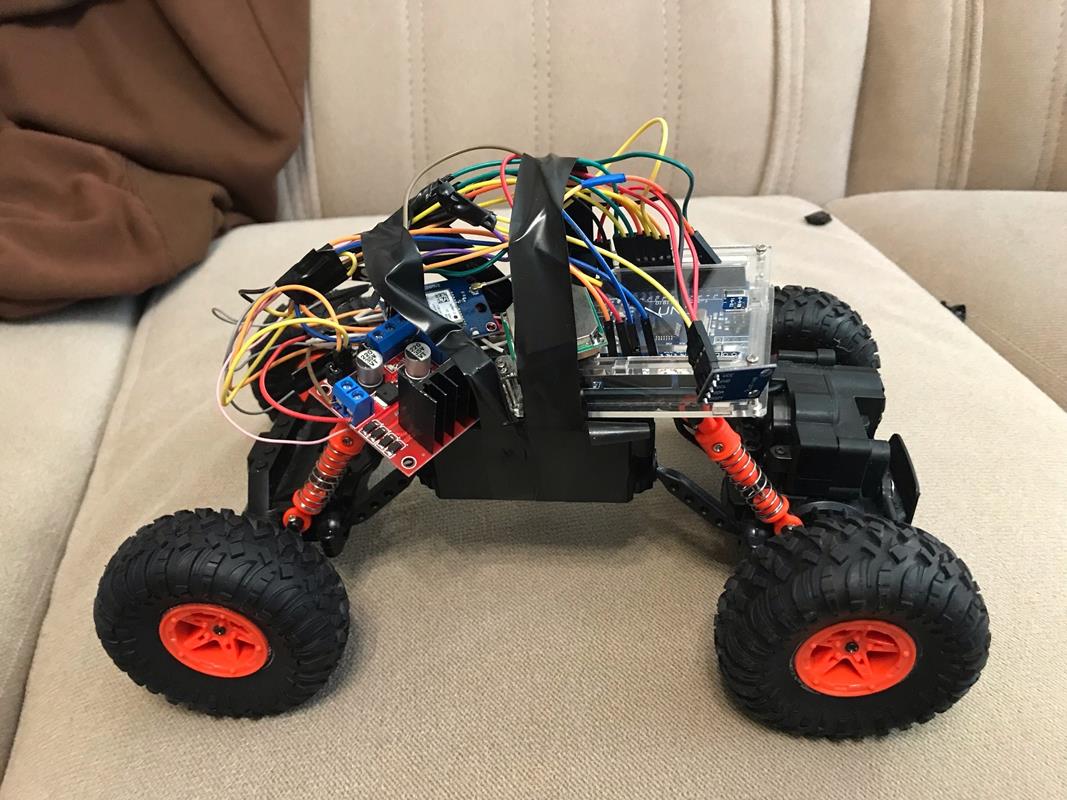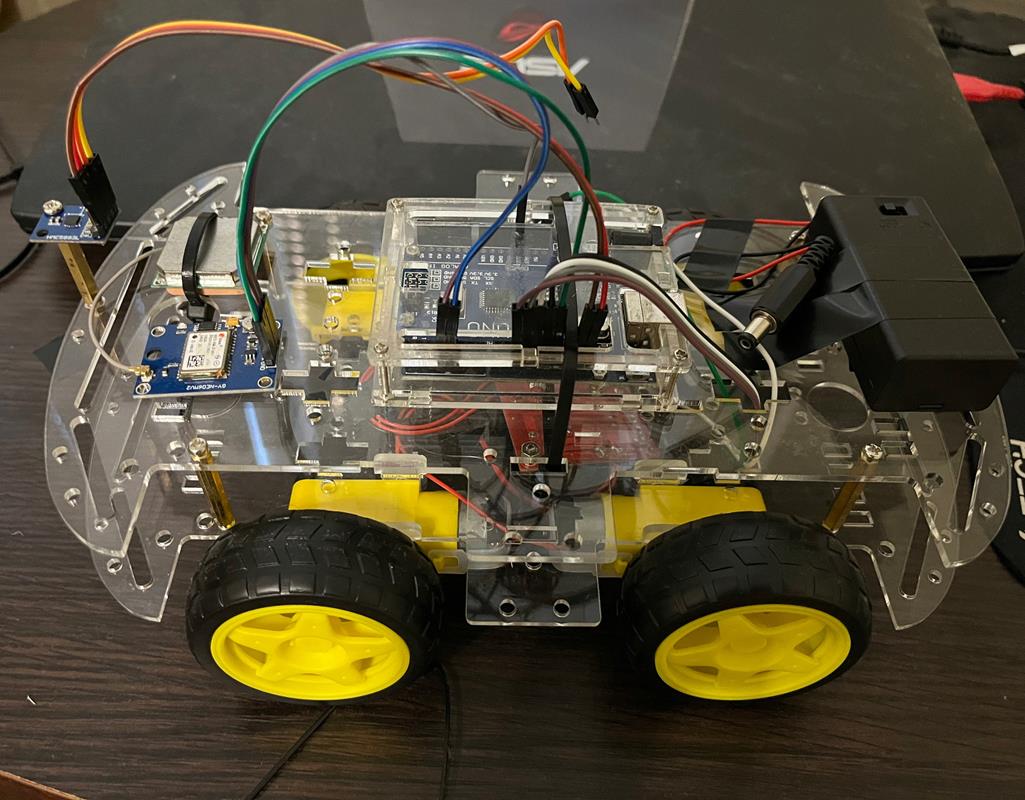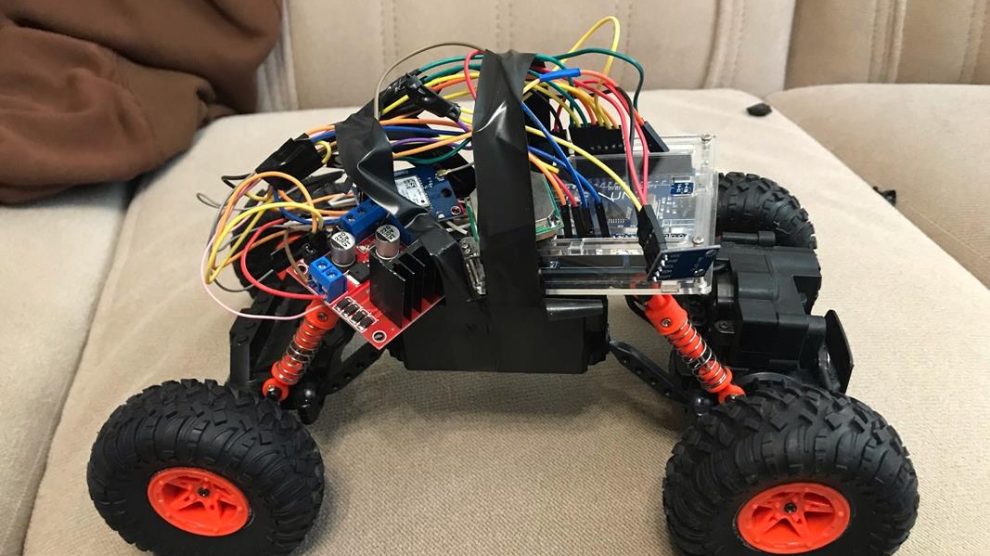
Члены студенческого конструкторского бюро «Бюро ЭлектроТехнического Творчества и Инноваций» показали первые результаты по проектированию автономной четырехколесного робота с перемещением по сигналам GTS и ГЛОНАСС. В проектируемое устройство вносятся координаты конечной точки и далее машинка достигает её из любого положения. Для того чтобы построить маршрут используется GPS-приёмник, который определяет точное позиционирование робота. В качестве приводов используются шаговые двигатели. «Мозгом» устройства является отладочная плата на базе Arduino.
Первые испытания прошли успешно. Машина точно определяла свои координаты и поворачивалась в том направлении, в котором находилась финишная точка. Достижение конечной точки осуществлялось достаточно точно и не превышало ошибки работы GPS-приёмника. Натурные испытания, которые проходили у главного корпуса ЕГМТУ и общежития позволили скорректировать настройку регулятора бля более быстрого и точного достижения цели.
По словам студентов из студенческого конструкторского бюро, самым сложным являлось программирование микроконтроллера, с которым они блестяще справились. Также студенты на собственном опыте увидели, насколько сильно влияют коэффициенты регулирования ПИД-регулятора на траекторию движения робота, закрепив тем самым и знания по теории автоматического управления.
Уже подготовлена новая модель робота, отличающаяся от предыдущей тем, что она фиксирует и объезжает препятствия.